OSD Overview
OpenSubdiv (Osd)
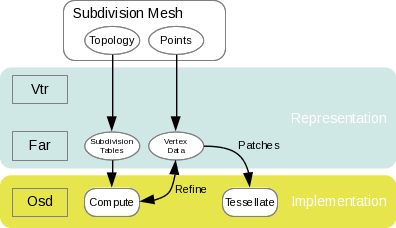
Osd contains client-level code that uses Far to create concrete instances of meshes. These meshes use precomputed tables from Hbr to perform table-driven subdivision steps with a variety of massively parallel computational backend technologies. Osd supports both uniform subdivision and adaptive refinement with cubic patches.
Modular Architecture
With uniform subdivision the computational backend code performs Catmull-Clark splitting and averaging on each face.
With adaptive subdivision, the Catmull/Clark steps are used to compute the CVs of cubic Bezier patches. On modern GPU architectures, bicubic patches can be drawn directly on screen at very high resolution using optimized tessellation shader paths.
Finally, the general manipulation of high-order surfaces also requires functionality outside of the scope of pure drawing.
Following this pattern of general use, Osd can be broken down into 3 main modules : Compute, Draw and Eval.
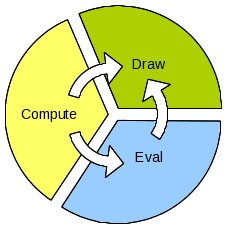
The modules are designed so that the data being manipulated can be shared and interoperated between modules (although not all paths are possible).
These modules are identified by their name spaces (Compute, Draw, Eval) and encapsulate atomic functationality. The vertex data is carried in interoperable buffers that can be exchanged between modules.
The typical use pattern is to pose the coarse vertices of a mesh for a given frame. The buffer is submitted to the Refine module which applies the subdivision rules and produces refined control vertices. This new buffer can be passed to the Draw module which will draw them on screen.
However, the same buffer of refined control vertices could be passed instead to the Eval module (and be projected onto another surface for instance) before being sent for display to the Draw module.
OsdCompute
The Compute module contains the code paths that manage the application of the subdivision rules to the vertex data. This module is sufficient for uniform subdivision applications.
OsdDraw
The Draw module manages interactions with discrete display devices and provide support for interactive drawing of the subdivision surfaces.
OsdEval
The Eval module provides computational APIs for the evaluation of vertex data at the limit, ray intersection and point projection.
OpenSubdiv enforces the same results for the different computation backends with a series of regression tests that compare the methods to each other.
Important
Face-varying smooth data interpolation is currently not supported in Osd. "Smooth UV" modes of various DCC applications are not supported (yet).
Cross-Platform Implementation
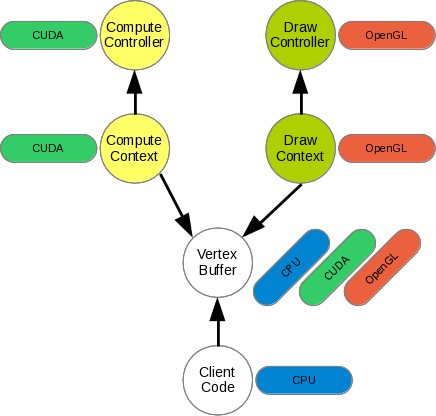
One of the key goals of OpenSubdiv is to achieve as much cross-platform flexibility as possible and leverage all optimized hardware paths where available. This can be very challenging however, as there is a very large variety of plaftorms and matching APIs available, with very distinct capabilities. The following chart illustrates the matrix of back-end APIs supported for each module.
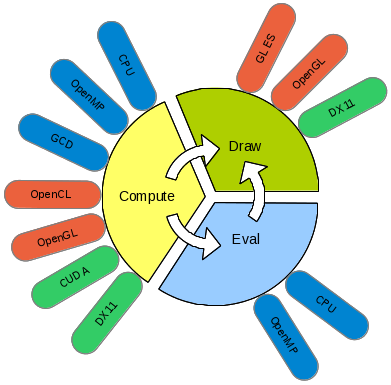
Since the Compute module performs mostly specialized interpolation computations, most GP-GPU and multi-core APIs can be deployed. If the end-goal is to draw the surface on screen, it can be very beneficial to move as much of these computations to the same GPU device in order to minimize data transfers.
For instance: pairing a CUDA Compute back-end to an OpenGL Draw backend could be a good choice on hardware and OS that supports both. Similarly, a DX11 HLSL-Compute Compute back-end can be paired effectively with a DX11 HLSL-Shading Draw back-end. Some pairings however are not possible, as there may be no data inter-operation paths available (ex: transferring DX11 compute SRVs to GL texture buffers). ----
Contexts & Controllers
At the core of Osd modularization is the need for inter-operating vertex buffer data between different APIs. This is achieved through a "binding" mechanism.
Binding Vertex Buffers
Each back-end manages data of 2 types: specific to each primitive manipulated (topology, vertex data...), and general state data that is shared by all the primitives (compute kernels, device ID...). The first type is contained in a "Context" object, the latter manipulated through a singleton "Controller".
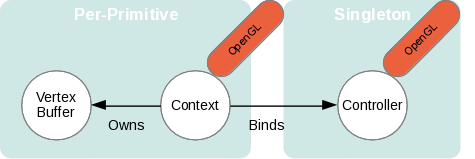
The Context itself holds the data that is specific to both the primitive and the operation that needs to be appled (ex: "drawing"). It also owns multiple buffers of vertex data. Contexts and Controller each have a specific back-end API, so only matching back-ends can be paired (ex: an OpenCL Context cannot be paired with a CUDA Controller).
Vertex Buffer Inter-Op
When a Controller needs to perform an operation, it "binds" the Context, which is the trigger to move the vertex data into the appropriate device memory pool (CPU to GPU, GPU to GPU...).
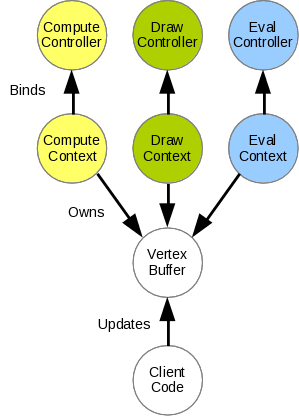
In practice, a given application will maintain singletons of the controllers for each of the modules that it uses, and pair them with the Contexts associated with each primitive. A given primitive will use one Context for each of the modules that it uses.
Example
Here is an example of client code implementation for drawing surfaces using a CUDA Compute module and an OpenGL Draw module.
The client code will construct a CudaComputeController and CudaComputeContext for the Compute stage, along with an GLDrawController and a GLDrawContext.
The critical components are the vertex buffers, which must be of type CudaGLVertexBuffer. The Contexts and Controllers classes all are specializations of a templated "Bind" function which will leverage API specific code responsible for the inter-operation of the data between the API-specific back-ends.