Vtr Overview
Vectorized Topology Representation (Vtr)
Vtr consists of a suite of classes that collectively provide an intermediate representation of topology that supports efficient refinement.
Vtr is intended for internal use only and is currently accessed through the Far layer by the Far::TopologyRefiner, which assembles these Vtr classes to meet the topological and refinement needs of the Far layer. What follows is therefore more intended to provide insite into the underlying architecture than to describe particular usage. For documentation more relevant to direct usage, proceed to the Far section previously noted.
Vtr is vectorized in that its topological data is stored more as a collection of vectors of primitive elements rather than as the faces, vertices and edges that make up many other topological representations. It is essentially a structure-of-arrays (SOA) approach to topology in contrast to the more common array-of-structures pattern found in many other topological representations. Vtr's use of vectors allows it to be fairly efficient in its use of memory and similarly efficient to refine, but the topology is fixed once defined.
Vtr classes are purely topological. They are even more independent of the representation of vertices, faces, etc. than Hbr in that they are not even parameterized by an interface to such components. So the same set of Vtr objects can eventually be used to serve more than one representation of these components. The primary requirement is that a mesh be expressable as an indexable set (i.e. a vector or array) of vertices, edges and faces. The index of a component uniquely identifies it and properties are retrieved by referring to it by index.
It's worth qualifying the term "topological" here and elsewhere -- we generally refer to "topology" as "subdivision topology" rather than "mesh topology". A subdivision hierarchy is impacted by the presence of semi-sharp creasing, as the subdivision rules change in response to that creasing. So subdivision topology includes the sharpness values assigned to edges and vertices that affect the semi-sharp creasing.
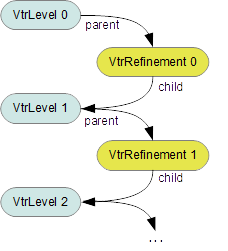
The two primary classes in Vtr consist of:
- Vtr::Level - a class representing complete vertex topology for a level
- Vtr::Refinement - a class mapping a parent Vtr::Level to a child level
Others exist to represent the following:
- selection and appropriate tagging of components for sparse refinement
- divergence of face-varying topology from the vertex topology
- mapping between face-varying topology at successive levels
- common low-level utilities, e.g. simple array classes
Vtr::Level
Vtr::Level is a complete topological description of a subdivision level, with the topological relations, sharpness values and component tags all stored in vectors (literally std::vectors, but easily changed via typedefs). There are no classes or objects for the mesh component types (i.e. faces, edges and vertices) but simply an integer index to identify each. It can be viewed as a structure-of-arrays representation of the topology: any property related to a particular component is stored in an array and accessible using the index identifying that component. So with no classes the for the components, its difficult to say what constitutes a "vertex" or a "face": they are each the sum of all the fields scattered amongst the many vectors included.
Level represents a single level of a potential hierarchy and is capable of representing the complete base mesh. There are no members that relate data in one level to any other, either below or above. As such, any Level can be used as the base level for a new subdivision hierarchy (potentially more than one). All relationships between separate levels are maintained in the Vtr::Refinement class.
Topological Relationships
Level requires the definition of and associations between a fixed set of indexable components for all three component types, i.e. an explicit edge list in addition to the expected set of vertices and faces. There are no explicit component objects in the representation, only an integer index (Vtr::Index) identifying each component within the set and data associated with that component in the various vectors.
The topology is stored as six sets of incident relations between the components: two each for the two other component types incident each component type, i.e.:
- for each face, its incident vertices and incident edges
- for each edge, its incident vertices and incident faces
- for each vertex, its incident edges and incident faces
The collection of incidence relations is a vectorized variation of AIF (the "Adjacency and Incidence Framework"). The set of these six incidence relations is not minimal (only four are required, but that set excludes the most desired face-vertex relation) but all six are kept and maintained to facilitate faster refinement. While the sizes of several vectors are directly proportional to the number of vertices, edges or faces to which the data is associated, the sizes of some of the vectors for these relations is more cumulative and so additional vectors of offsets is required (typical of the face-vertex list commonly used as the minimal definition of mesh topology).
Vectors for the sharpness values associated with crease edges and corner vertices are included (and so sized according to the number of edges and vertices), along with additional tags for the components that may be helpful to refinement (i.e. the type of subdivision Rule associated with each vertex).
A Level is really just a container for data in a subdivision level, and so its public methods are primarily to access that data. Modification of the data is protected and only made available to classes that are intended to construct Levels: currently the Far factory class that is responsible for building the base level, and the Vtr::Refinement class that constructs subsequent levels during refinement.
Memory Efficiency
One of the advantages in storing data in what is essentially a structure-of-arrays, rather than the array-of-structures more typical of topological representations, is that we can be more selective about memory usage in some cases. Particularly in the case of uniform refinement, when the data in subsequent levels is typically 4x its predecessor, we can minimize what we either generate or keep around at each level. For instance, if only a face-list is required at the finest level, we only need to generate one of the six topological relations: the vertices incident each face. When we do keep Levels around in memory (as is the case with the Far::TopologyRefiner) we do have do have the opportunity to prune what is not strictly necessary after the refinement. Just as with construction, whatever classes are privileged to construct a Level are likely those that will be privileged to prune its contents when needed.
The current implementation of Level is far from optimal though -- there are opportunities for improvement. After one level of subdivision, the faces in a Level will be either all quads or tris. Having specializations for these cases and using the more general case in support of N-sided faces for the base level only is one possibility. Levels also allocate dozens of vectors in which to store all data. Since these vectors are of fixed size once created, they could be aggregated by partitioning one or a smaller number of larger block of memory into the desired pieces. The desire to make some of these improvements is part of why Vtr is not directly exposed for public use and instead exposed via Far.
Vtr::Refinement
While Vtr::Level contains the topology for each subdivision level, Vtr::Refinement is responsible for creating a new level via refinement of an existing one, and for maintaining the relationships between the components in the parent and child levels. So a simplified view of a subdivision hierarchy with Vtr is a set of Levels with a Refinement between each successive pair.
Refinement is a friend of Level and will populate a child level from a parent given a set of refinement parameters. Aside from parameters related to data or depth, there are two kinds of refinement supported: uniform and sparse. The latter sparse refinement requires selection of an arbitrary set of components -- any dependent or "neighboring" components that are required for the limit will be automatically included. So feature-adaptive refinement is just one form of this selective sparse refinement, the criteria being the topological features of interest (creases and extra-ordinary vertices). The intent is to eventually provide more flexibility to facilitate the refinement of particular regions of interest or more dynamic/adaptive needs.
Refinement has also been subclassed according to the type of topological split being performed, i.e. splitting all faces into quads or tris via the QuadRefinement and TriRefinement subclasses. As noted with Vtr::Level, there is further room for improvement in memory and/or performance here by combining more optimal specializations for both Refinement and Level -- with consideration of separating the uniform and sparse cases.
Parent-child and child-parent relationships
While Refinement populates a new child Level as part of its refinement operation, it also accumulates the relationships between the parent and child level (and as with Level, this data is stored in vectors indexable by the components).
The associations between components in the two levels was initially only uni-directional: child components were associated with incident components of a parent component based on the parent components topology, so we had a parent-to-child mapping (one to many). Storing the reverse child-to-parent mapping was avoided to reduce memory (particularly in the case of uniform refinement) as it often was not necessary, but a growing need for it, particularly in the case of sparse feature-adaptive refinement, lead to it being included.
Data flexibility
One of the advantages of the structure-of-arrays representation in both Level and Refinement is that we can make more dynamic choices about what type of data we choose to allocate and use based on needs. For instance, we can choose between maintaining the parent-child or child-parent mapping in Refinement, or both if needed, and we can remove one if no longer necessary. An active example of this is uniform refinement: if we only require the face-vertex list at the finest subdivision level, there is no need to generate a complete topological description of that level (as would be required of more traditional representations), and given that level is 4x the magnitude of its parent, the savings are considerable.
Currently there is nothing specific to a subdivision scheme in the refinement other than the type of topological splitting to apply. The refinement does subdivide sharpness values for creasing, but that too is independent of scheme. Tags were added to the base level that are propagated through the refinement and these too are dependent on the scheme, but are applied externally.